登录 / 注册
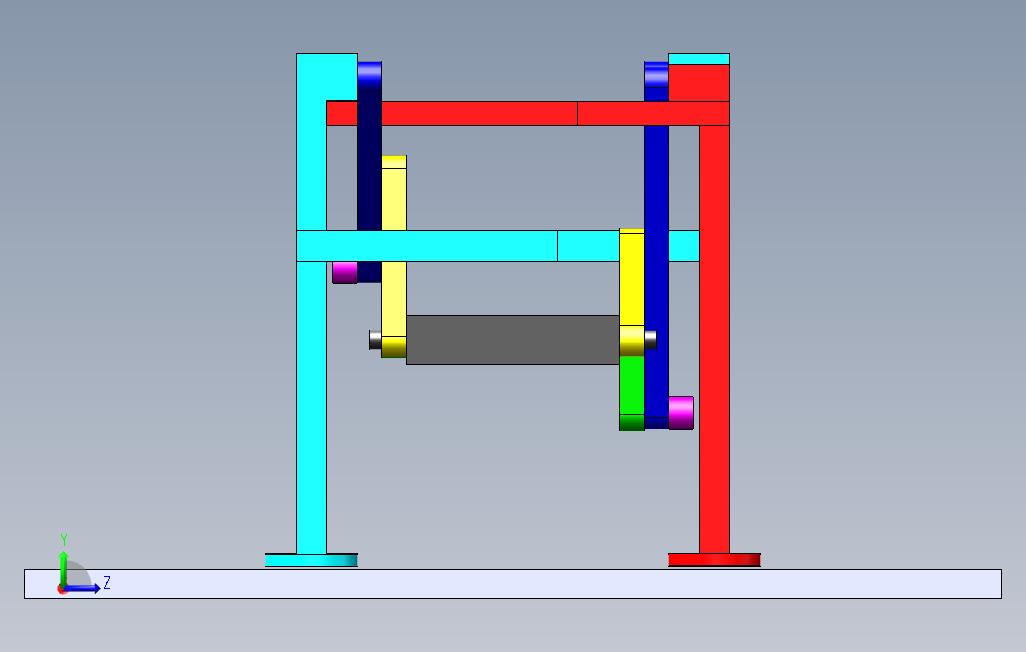
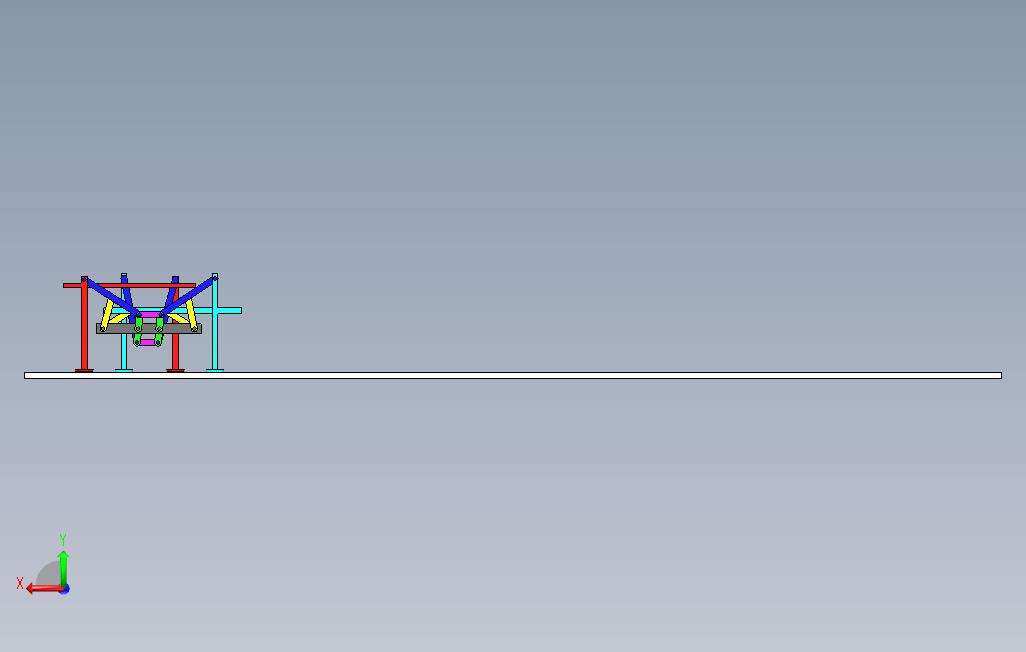
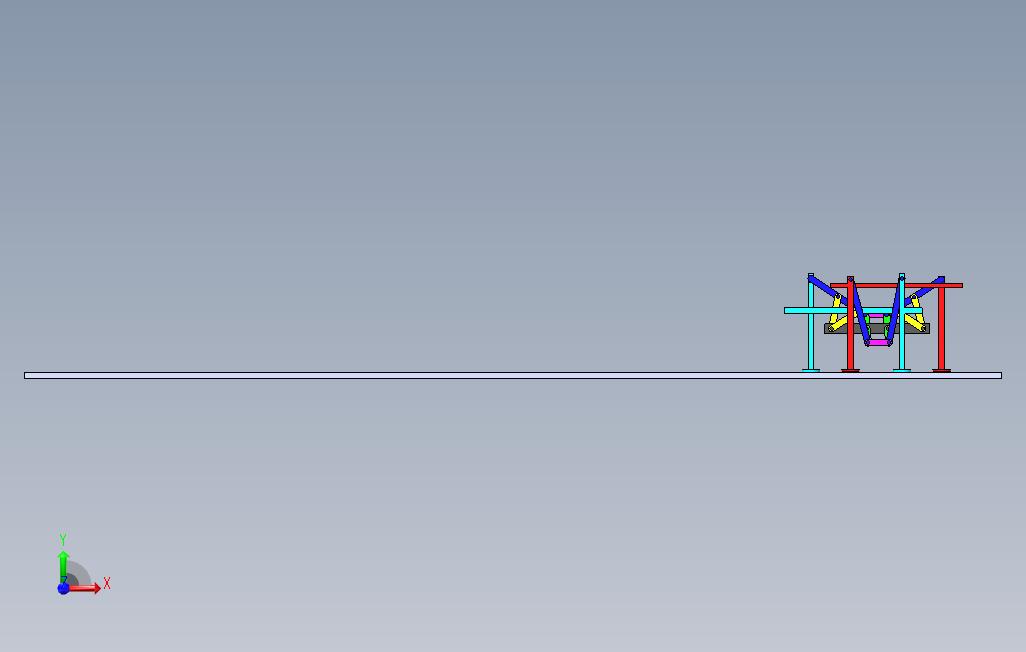
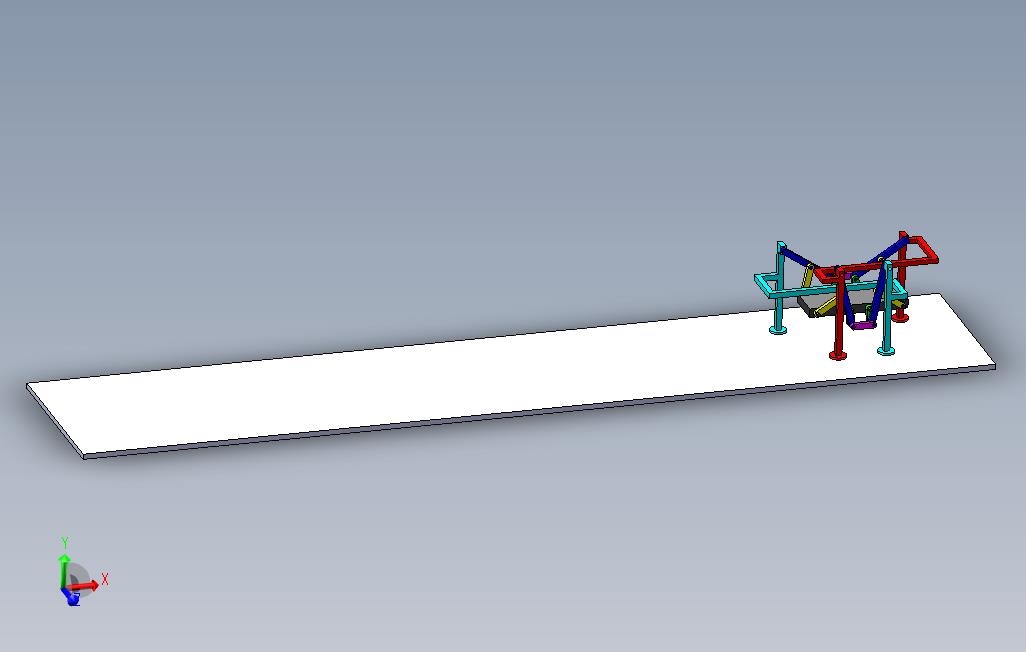
该机构为契贝谢夫4足机器人,是由曲柄摇杆和平行四边形机构的组合而来,实现以对角线迈步的特点,各连杆参数均在图纸中,还有附带motion仿真动画,喜欢机器人机构的人就不要错过了(连杆比例很重要,切勿乱标注)
契贝谢夫机器人
图纸描述
该机构为契贝谢夫4足机器人,是由曲柄摇杆和平行四边形机构的组合而来,实现以对角线迈步的特点,各连杆参数均在图纸中,还有附带motion仿真动画,喜欢机器人机构的人就不要错过了(连杆比例很重要,切勿乱标注)
下载需要30金币
立即下载 收藏
图纸信息
作者
羊拱喘
已分享: 份作品

文件列表
| # | 文件名称 | 大小 |
|---|---|---|
| 1 |  Thumbs.db Thumbs.db | 44.50K |
| 2 | 契贝谢夫.avi | 1.52M |
| 3 |  契贝谢夫机器人.SLDASM 契贝谢夫机器人.SLDASM | 12.72M |
机械资料库
工程师必备!
- › 基础理论知识 —公差配合、螺纹连接、互换性、材料等基础面试知识
- › 工程材料 —各类常用钢、铝、合金等金属材料及塑件橡胶等非金属材料
- › 加工制造 —加工工艺,切削、锻造、冲压、焊接,工艺流程、材料性能
- › 机械传动 —齿轮传动、皮带传动、链传动、丝杆及气压液压传动等知识
- › 表面处理 —热处理、机械表面处理、化学表面处理等技术的理解与运用
- › 力学 —力学概念的理解、力学在机械设计实践中的应用及材料力学知识
- › 机械制图 —机械制图中的三视图、线型、标注等,及CAD操作等内容
- › 气压及液压 —气压、液压传动原理及构成、气缸和液压缸的运用及选型
- › 钣金 —钣金常用材料,折弯、冲压等加工工艺,设计原则以及实际应用
- › 模具设计 —涵盖注塑模具、冲压模具等知识,以及产品设计等多个领域
- 机械设备图纸
- 海量机械设备图纸、非标设备、自动化、包装、农业、医疗、食品、印刷等设备、及输送线、生产线等。
- 课程及毕业设计
- 机械类、理工类毕业设计、课程设计图纸下载,包含2D及3D设计图、论文参考。
- 机械零部件模型
- 各类机械零部件图纸下载,包含工装夹具、传动部件、电机减速机、液压气动、丝杆模组等。

- 产品设计模型
- 各行业产品设计模型,3C、电子、数码产品、电脑周边、手机相关、家用电器等图纸。
- 机器人图纸
- 智能多样的机器人图纸,自动化设计图、机械手、机械臂、码垛搬运、工业机器人等图纸。
- 模具设计图纸
- 多样化模具3D数模,注塑模具、冲压模具、铸造模具、模具设备、注塑机等。
- 交通运输类图纸
- 汽车相关设计图纸,整车设计、车身内外饰、底盘悬架、转向系统、制动系统、发动机、电子系统等。
- 建筑图纸
- 建筑类CAD及3D设计图,民用建筑,公共建筑、钢结构、室内设计、园林、暖通、给排水、别墅。
- 电子电工
- 电器设备及元件、感应类元件、控制类元件、操作类元件、仪器仪表、PLC、单片机等。

- 军工模型
- 飞机模型、无人机、坦克模型、航空类模型、航洋船舶、船只模型、潜水器等。
- 设计方案
- 工业设计方案、设备设计、生产线方案、非标自动化设计方案、创新创意设计等。

- 机械标准件模型库
- Soildworks标准件模型库、CAD、Creo/proe、UG标准件库、外购件选型库、绘图模板等。
- 机械设计资料汇总
- 全网最全机械设计资料汇总,宏图网精心收集,免费分享 助力机械行业奋斗的你。

- 常用外购件选型资料
- 电机、减速机、气缸、丝杆、模组、导轨、同步轮、电气件等选型软件及选型资料。

- 机械设计及软件视频教程下载
- CAD、Soildworks、Creo/proe视频教程、非标设计教程、钣金设计教程、电气教程等。

- 各类机械设计手册下载
- 机械设计手册、设计全书、加工手册、钣金手册、机械设计禁忌手册等。
- 标准件资料文档
- 紧固件、轴承、联轴器等机械标准件资料;国家标准、行业标准资料等。

- 加工工艺资料
- 机械制造工艺资料、车削加工知识及手册、热处理工艺技术资料、表面处理工手册等。

- 电气资料
- 电气工程师手册、plc编程技术知识及运用汇总、伺服电机使用手册及资料等。

- 常用机械设计工具下载
- 公差配合查询软件、齿厚换算工具、弹簧设计、材料查询软件、V带设计工具、钣金工具等。